




C/L/U-type dobbeltakset servopositioner
Tekniske parametre
| C-type dobbeltakset servopositioner | L-type dobbeltakset servopositioner | U-type dobbeltakset servopositioner | |||||||||||
| Serienummer | PROJEKTER | Parameter | Parameter | Parameter | BEMÆRKNINGER | Parameter | Parameter | Parameter | BEMÆRKNINGER | Parameter | Parameter | Parameter | BEMÆRKNINGER |
| 1 | Nominel belastning | 200 kg |
500 kg | 1000 kg | Inden for en radius på R400 mm/R400 mm/R600 mm af den anden akse | 500 kg | 1000 kg | 2000 kg | Inden for en radius på R400 mm/R600 mm/R800 mm af den anden akse | 1000 kg | 3000 kg | 5000 kg | Inden for en radius på R600 mm/R1500 mm/R2000 mm af den anden akse |
| 2 | Standard gyrationsradius | R400mm | R400mm | R600mm |
| R400mm | R600mm | R800mm |
| R600mm | R1500mm | R2000mm |
|
| 3 | Første akse vippevinkel | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | Anden akse rotationsvinkel | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | Nominel opadgående hastighed for første akse | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | Nominel rotationshastighed for anden akse | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | Gentag positioneringsnøjagtighed | ±0,10 mm | ±0,15 mm | ±0,20 mm |
| ±0,10 mm | ±0,10 mm | 17°/S |
| ±0,15 mm | ±0,20 mm | ±0,25 mm |
|
| 8 | Grænsedimension af forskydningsramme (længde×bredde×højde) | 1200 mm × 600 mm × 70 mm | 1600 mm × 800 mm × 90 mm | 2000 mm × 1200 mm × 90 mm |
| - | - | - |
| - | - | - |
|
| 9 | Samlede dimensioner af positionsskifter (længde × bredde × højde) | 2000 mm × 1100 mm × 1700 mm | 2300 mm × 1200 mm × 1900 mm | 2700 mm × 1500 mm × 2200 mm |
| 1500 mm × 500 mm × 850 mm | 2000 mm × 750 mm × 1200 mm | 2400 mm × 900 mm × 1600 mm |
| 4200 mm × 700 mm × 1800 mm | 5500 mm × 900 mm × 2200 mm | 6500 mm × 1200 mm × 2600 mm |
|
| 10 | Standard toakset roterende plade | - | - | - | - | Φ800mm | Φ1200mm | Φ1500mm |
| Φ1500mm | Φ1800mm | Φ2000mm |
|
| 11 | Centerhøjden for den første akserotation
| 1200 mm | 1350 mm | 1600 mm |
| 550 mm | 800 mm | 1000 mm |
| 1500 mm | 1750 mm | 2200 mm |
|
| 12 | Strømforsyningsforhold | Trefaset 200V ± 10% 50HZ | Trefaset 200V ± 10% 50HZ | Trefaset 200V ± 10% 50HZ | Med isolationstransformer | Trefaset 200V ± 10% 50HZ | Trefaset 200V ± 10% 50HZ | Trefaset 200V ± 10% 50HZ | Med isolationstransformer | Trefaset 200V ± 10% 50HZ | Trefaset 200V ± 10% 50HZ | Trefaset 200V ± 10% 50HZ | Med isolationstransformer |
| 13 | Isoleringsklasse | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | Udstyrets nettovægt | Omkring 800 kg | Omkring 1300 kg | Omkring 2000 kg |
| Omkring 900 kg | Omkring 1600 kg | Omkring 2500 kg |
| Omkring 2200 kg | Omkring 4000 kg | Omkring 6000 kg | |
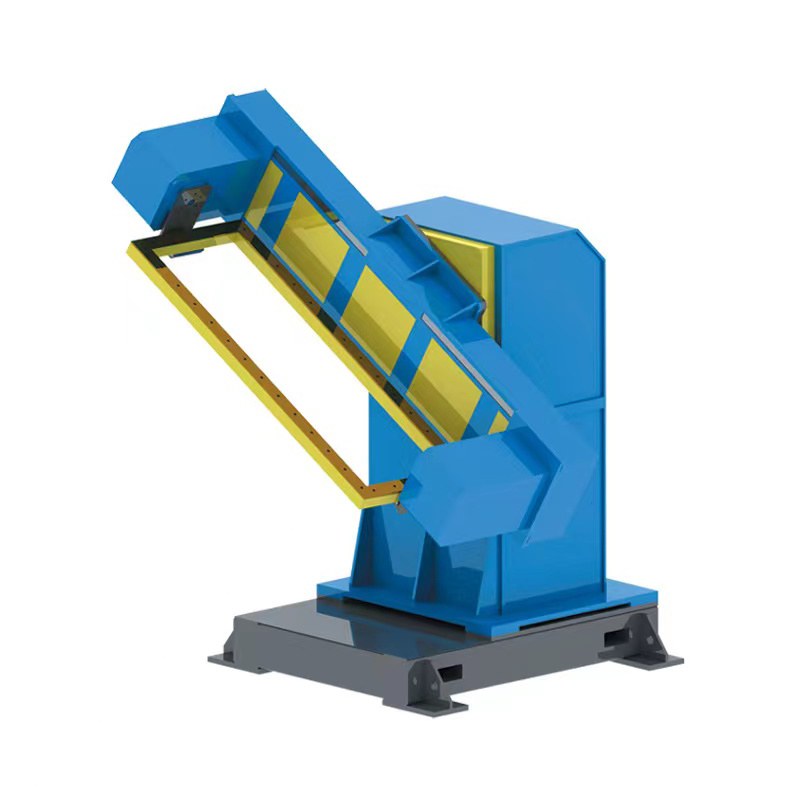
C-type dobbeltakset servopositioner
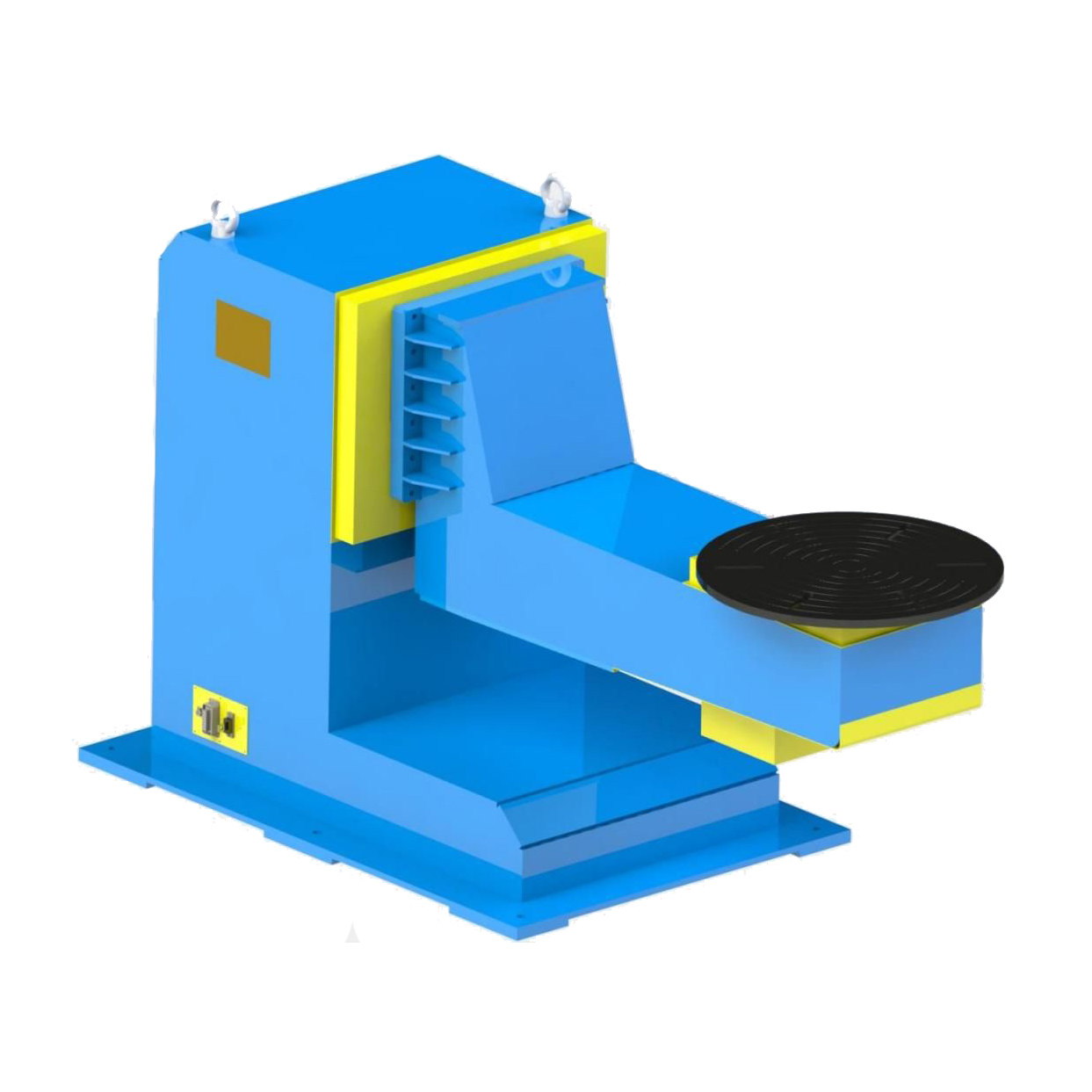
L-type dobbeltakset servopositioner

U-type dobbeltakset servopositioner
Struktur Introduktion
Den dobbeltaksede servopositioner består hovedsageligt af en svejset integreret ramme, svejset forskydningsramme, AC servomotor og RV præcisionsreduktionsgear, roterende støtte, ledende mekanisme, beskyttelsesskjold og elektrisk styresystem. Den svejsede integrerede ramme er svejset med profiler af høj kvalitet. Efter udglødning og spændingsaflastning skal den bearbejdes med professionel bearbejdning for at sikre høj bearbejdningsnøjagtighed og nøjagtighed af nøglepositioner. Overfladen er sprøjtet med rustbeskyttelsesmaling, som er smuk og generøs, og farven kan tilpasses efter kundens behov.
Den svejsede forskydningsramme skal svejses og støbes med profilstål af høj kvalitet og bearbejdes professionelt. Overfladen skal bearbejdes med standardskruehuller til monterings- og positioneringsværktøj, og der skal udføres maling, sværtning og rustforebyggende behandling.
Den roterende platform vælger profilstål af høj kvalitet efter professionel mekanisk bearbejdning, og overfladen er bearbejdet med standardskruehuller til montering af positioneringsværktøj, og der skal udføres sortbehandling og rustforebyggende behandling.
Valg af AC servomotor og RV-reduktionsgear som kraftmekanisme kan sikre rotationsstabilitet, positioneringsnøjagtighed, lang holdbarhed og lav fejlrate. Den ledende mekanisme er lavet af messing, som har en god ledende effekt. Den ledende base har integreret isolering, som effektivt kan beskytte servomotor, robot og svejsestrømkilde.
Det elektriske styresystem bruger japansk Omron PLC til at styre positioneren med stabil ydeevne og lav fejlrate. De elektriske komponenter er udvalgt fra kendte mærker i ind- og udland for at sikre kvalitet og stabilitet i brugen.











